Measurement
We are characterizing a
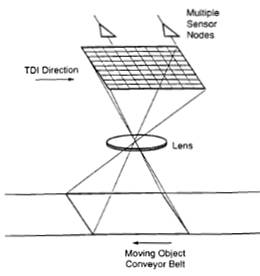
line scan camera based on CCD TDI Sensor, and developing a model to analysis the sensor
performance. TDI is Time-Delay-Integration. In TDI, there is a bank of CCD devices.
The first piece of the devices collects the charge from the light and then
transfers to the second one, and so forth until the last one. The movement of the target needs to be synchronized because the
charge is transferred to the second CCD device which has to see the same object
since its signal will get added to the signal that was transferred.
|
|
|
|
Line Scan Camera based on CCD TDI Sensor |
CCD TDI operation |

To model the line sensor, we first
characterized the sensor by taking some measurement:
- Temporal noise Measurement: readout noise, dark current
- Spatial noise Measurement: dark signal non-uniformity (DNSU), photo
response non-uniformity (PRNU)
- Spectral measurements: spectral quantum efficiency
Readout Noise:
Readout noise is the variance in digital numbers (DNs) from repeated reads of the same pixel. We first use the line sensor to capture multiple images under dark conditions with constant exposure (integration time 0.1 msec or 10,000 loops per second). We took images under 8-, 9-, and 10-bit quantization, and for each quantization, we set TDI to 4, 16, 32, 64, 96. We can then determine the readout noise by calculating the standard deviation of the mean pixel value for the same pixel across the 2775 reads.
We also compare the readout noise under different bits representation (with 4 TDI). As expected, from the first figure below, the readout noise of 10-bit quantized image is the highest, and the 8-bit one is lowest. However, since we expect to get the same amount of voltage of readout noise despite of the number of bits we use to quantize the image, we further normalized the values by dividing 2 for 9-bit and dividing 4 for 10-bit values. As shown in the second figure below, the curves are overlapped to 8-bit curve.
Therefore, we average the readout noise over 5 different TDI, and thus get readout noise: 1.1DN, 2,2DN, and 4,4DN for 8-, 9-, and 10-bit system respectively. Our measurement is good when comparing to the value in the camera manual, 2DN for 8-bit system.
Dark Current:
Dark current is the current measured under absence of light. To measure dark current, we use the line sensor capture multiple raw images in the dark with varying exposure duration (integration time 0.1msec to 20 msec) using 10-bit quantization and under 4 TDI. First, we took average over the multiple raw images to minimize the contribution from readout noise. As shown in the figure below, the voltages grow up as expected with integration time increasing. The first 5 measurements construct a line with slope 23.8856, which is our dark current with unit DN/msec. From the camera manual, the dark current is 4DN (dc) under 8-bit system, and hence is 16DN under 10-bit system, which is not far from our measurement, 23.9 DN/msec.
DSNU:
Dark Signal Non-Uniformity (DSNU) is the variance in offset across different pixels. From the same image data set which we used for dark current, we average over multiple measurements to minimize the effects of read noise. Then obtain DSNU by calculating the standard deviation of the mean pixel value across the raw pixels. Our measurement for DSNU is 5.5%, which is slightly higher than the value in sensor datasheet (<5%).
PRNU:
Photo Response Non-Uniformity (DSNU) is the variance in sensitivity across different pixels. To measure PRNU, we use line sensor to capture multiple images under an ideally uniform light field with different exposure durations (integration time from 0.16msec to 0.33msec, in step of 0.02msec).
However, due to some equipment limit, after averaging over the multiple raw images, the signals are not spatially well-uniform distributed (see the figure below, left one). We first filter out the edges which are dark. To uniform the middle part of curves, we make a polynomial model fitting into each un-uninformed curve and undo the effect of the curvature by dividing the curve by the corresponding polynomial. The figure below (right one) is the uniformed curve. (Note that we scale each curve by some factor so they won’t be overlapped, and this action should not affect the PRNU value.)
|
Un-uniformed curves |
Uniformed curves |
|
|
|
Now we can think of the images as being captured under uniform illumination. We first determine the mean signal by taking the average from all pixels, and calculate standard deviation of the signal around the mean value across the raw pixels. The ratio of std to mean signal (expressed in %) is PRNU. Our measurement for PRNU is 5.8%, which is slightly higher than 5% shown in the sensor manual.
QE:
Since different sensors may have different color sensitivities, we want to measure the spectral sensitivity of our line sensor. We first use line sensor to capture multiple images under uniform and monochromatic light source, which has wavelength from 400nm to 800nm in 10nm step, and adjust the exposure time for each measurement so that there is no saturation or under-exposure. We can then obtain the relative QE by averaging across all the pixels from the most uniform region of images and normalizing with appropriate factor according to the exposure time. Second, we measure the spectra of each of the monochromatic light and have the spectrum in the figure below.
For each wavelength, divide the average value by the energy in the peak (area under the curve). Finally, renormalize the result at 650 nm to be 0.22 and we get the QE curve as shown below.
From the Spectrum, we also found the mapping from labeled wavelength to actual wavelength. The labeled wavelength is from 400nm to 800nm in 10nm step, and the actual wavelength is the wavelength that the peak corresponds to.
Wavelength mapping (unit: nm):
|
Labeled |
400 |
410 |
420 |
430 |
440 |
450 |
460 |
470 |
480 |
490 |
500 |
510 |
520 |
530 |
540 |
550 |
|
Actual |
396 |
404 |
416 |
424 |
436 |
444 |
456 |
468 |
476 |
484 |
496 |
504 |
516 |
524 |
536 |
544 |
|
Labeled |
560 |
570 |
580 |
590 |
600 |
610 |
620 |
630 |
640 |
650 |
660 |
670 |
680 |
690 |
700 |
|
|
Actual |
556 |
564 |
576 |
584 |
596 |
604 |
616 |
624 |
636 |
644 |
656 |
664 |
676 |
684 |
696 |
|
(Note: here list visible range only)
CCD5045 Characterization Summary
|
Read noise, |
1.1 DN (8-bit) |
|
Dark current, |
23.9 DN/ms (dc) |
|
Dark signal non-uniformity, |
5.9% |
|
Full well capacity, |
200,000 e- |
|
Dynamic range |
3,000 |
|
Pixel conversion gain, |
3 µV/e- |
|
Quantum efficiency (650nm) |
0.22 |
|
Pixel size |
13 µm x 13 µm |
|
Fill factor |
100 % |
|
Photo response non-uniformity |
5.9 % (TDI = 96) |
ISET Noise Summary:
The line sensor can capture image which moves with very high speed (50 inches or 5 pages per second). We had the patches on the drum, and let the drum spin with low speed and high speed. As shown below, both the images taken by the camera are very good.
|
Original image (scanned
in color at 300 dpi) |
|
|
|
|
|
Result
image (16 tdi, 1 pages/sec; sync’d) |
Result
image (16 tdi, 5 pages/sec; sync’d) |
|
|
|